หุ่นยนต์ขั้นสูง
หุ่นยนต์ขั้นสูง ปัญญาประดิษฐ์ (AI) เป็นวิชาที่ซับซ้อนมาก เราไม่รู้จริง ๆ ว่า จะเกิดอะไรขึ้น เมื่อ AI มีการพัฒนาถึงขั้นสุด เราทุกคนเคยเห็นในภาพยนตร์ไซไฟ ที่หุ่นยนต์ที่ทำงานบน AI คิดว่า ตัวเองเหนือกว่ามนุษย์อย่างมากมาย
ส่วนใหญ่ดูเหมือนจริงเพราะแม้แต่มนุษย์ ก็ยังไม่รู้ว่า กำลังสร้างอะไร สามารถเรียนรู้อะไรได้บ้าง และผลที่ตามมาคืออะไร เป็นคำเตือนเล็กน้อยเกี่ยวกับอันตรายของความโอหังของมนุษย์ แต่ก็ไม่ได้หยุดเราไม่ให้สำรวจ
ความอยากรู้ในสิ่งที่เราสามารถทำได้ คือ เหตุผลหลักว่า ทำไมเรายังคงทดลอง และพัฒนาเทคโนโลยีเหล่านี้ต่อไป ซึ่งวันนี้ เรากำลังจะนำเสนอหุ่นยนต์ขั้นสูงบางตั วที่ออกแบบมาเพื่อเรียนรู้และทำงานเฉพาะ ดังนี้
1. HUBO
HUBO เป็นหุ่นยนต์ฮิวแมนนอยด์ ผู้ชนะ DARPA Robotics Challenge (DRC) 2015 ได้รับการพัฒนาโดยสถาบันวิทยาศาสตร์ และเทคโนโลยีขั้นสูงของเกาหลี (KAIST) และมีการเปิดตัวครั้งแรก เมื่อวันที่ 6 มกราคม พ.ศ. 2548 หุ่นยนต์ถูกสร้างขึ้นเพื่อทำงานหลายอย่าง

DRC-HUBO เผชิญหน้ากับหุ่นยนต์อีก 22 ตัวจาก 5 ประเทศและได้รับรางวัลใหญ่มูลค่า 2 ล้านเหรียญ พวกเขาต้องขับรถ ลงจากรถ เดิน เปิดประตู ขจัดสิ่งกีดขวาง เจาะกระดาษแข็ง และเดินขึ้นบันได เสร็จสิ้นการท้าทายทั้งหมดใน 44 นาที 28 วินาที
ความสามารถในการ “เปลี่ยนรูป” ในการสลับไปมาระหว่างเครื่องจักร ที่มีล้อเป็นรถสองเท้าที่พิสูจน์แล้วว่า เป็นกุญแจสู่ชัยชนะ
2. แขนหุ่นยนต์ซามูไร (Samurai Robot Arm)
นักวิจัยของญี่ปุ่น ได้เริ่มสอนหุ่นยนต์ถึงวิธีการแกว่งดาบ ในเดือนเมษายน 2015 ห้องปฏิบัติการ Nimiki ได้สร้างหุ่นยนต์จัดการวัสดุความเร็วสูง 6 แกนชื่อMotoman MH24 ได้รับการออกแบบมาเพื่อใช้ในงานประกอบ การจ่าย การหล่อวัสดุ และการบรรจุหีบห่อ
สำหรับ “โครงการ Yaskawa Bushido” นั้น Yaskawa Electric Corporation ได้ร่วมกับ Isao Machii (ผู้เชี่ยวชาญด้านเทคนิคการต่อสู้ด้วยดาบ Iaijutsu)
แขนกล Machii และ MH24 พิชิต 5 ความท้าทาย – หั่นผลไม้ ดอกไม้ และพีพอดวางในแนวนอนตรงกลาง เครื่องมีประสิทธิภาพเท่ากับ Machii โดยมีข้อดีเพิ่มเติม คือ ไม่ต้องพัก
3. Spot

ในปี 2548 Boston Dynamics ได้เปิดตัวBigDog . ตอนนี้มีเวอร์ชันที่เล็กกว่าและขั้นสูงที่เรียกว่า Spot หุ่นยนต์สี่ขาที่ขับเคลื่อนด้วยไฟฟ้าซึ่งกระตุ้นด้วยไฮดรอลิกสามารถเตะได้ดี
หุ่นยนต์น้ำหนัก 72.5 กก. สามารถขึ้นบันไดและเดินขึ้นทางลาดชันได้อย่างง่ายดาย ขาของสปอตทำมุมไปข้างหลังเหมือนขาแพะ และกระโดดได้เหมือนกัน
ใช้การสแกน LIDAR เพื่อนำทาง ปีนบันได วิ่งกับมนุษย์ และเคลื่อนที่ด้วยหุ่นยนต์อีกตัว เป็นที่รู้จักกันดีในการรักษาสมดุลซึ่งแสดงให้เห็นเป็นอย่างดีในวิดีโอ Boston Dynamics ไม่ได้เปิดเผยข้อมูลมากมายเกินกว่าที่จะบอกว่ามันถูกพัฒนาขึ้นสำหรับการดำเนินงานในร่มและกลางแจ้ง
4. หุ่นยนต์เสือชีต้า MIT
นักวิจัยของ MIT ได้ออกแบบเครื่องจักรที่ได้รับแรงบันดาลใจจากเสือชีตาห์ ซึ่งสามารถมองเห็น วิ่ง และกระโดดข้ามสิ่งกีดขวางที่ถูกโยนเข้าไปในเส้นทางได้อย่างง่ายดาย
โครงการนี้ ได้รับทุนจาก DARPA’s (หน่วยงานโครงการวิจัยขั้นสูงด้านการป้องกันประเทศ) แผนกเคลื่อนย้ายและจัดการสูงสุดของ DARPA ควรจะให้ความช่วยเหลือในการบรรเทาสาธารณภัยในอนาคต
หุ่นยนต์สามารถมองเห็นสิ่งกีดขวางได้โดยใช้เซ็นเซอร์แบบเลเซอร์ 2 มิติ และสามารถคำนวณวิธีที่ดีที่สุดในการกระโดดข้ามสิ่งกีดขวางแบบเรียลไทม์
เครื่องจักรขนาด 32 กิโลกรัมจะเหยียบเท้าหลังจากการกระโดดและเดินทางต่อไป มันถูกออกแบบเป็นพิเศษสำหรับพฤติกรรมที่มีพลวัตสูง และตอนนี้ นักวิทยาศาสตร์กำลังวางแผนที่จะทดสอบเสือชีตาห์ในที่โล่ง เพื่อสังเกตว่ามันทำงานอย่างไรในโลกแห่งความเป็นจริง
5. Hector
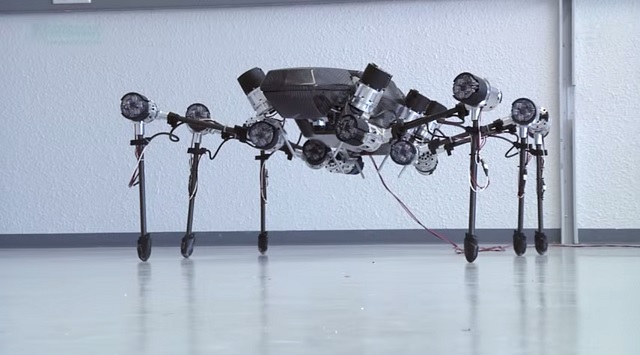
Hector (หุ่นยนต์ปฏิบัติการทางปัญญา Hexapod Cognitive autonomously) สร้างขึ้นโดยทีมวิจัยที่มหาวิทยาลัยบีเลเฟลด์
ประเทศเยอรมนี ได้แรงบันดาลใจจากการเคลื่อนไหวของแมลงสาบ มันสามารถทำตัวเหมือนแมลงและตัดสินใจ (หรือเรียนรู้จากประสบการณ์) ว่าจะเคลื่อนไหวอย่างไรในบริเวณใกล้เคียง
หุ่นยนต์มี 6 แขนขา ซึ่งสามารถเคลื่อนที่ได้อย่างอิสระ ทำให้ปรับตัวให้เข้ากับพื้นผิวที่กำลังเดินได้อย่างรวดเร็ว การใช้เซ็นเซอร์ และกล้องระยะใกล้
Hector สามารถค้นหาวิธีเอาชนะอุปสรรคที่คาดเดาไม่ได้ในเส้นทางของมัน ลำตัวทำจากโครงกระดูกภายนอกที่เบามาก พลาสติกเสริมคาร์บอนไฟเบอร์ และข้อต่อไฟฟ้าแบบพาสซีฟสิบแปดข้อที่เลียนแบบท่าทางของกล้ามเนื้อ